Crowd Wisdom
“At a country fair .. 800 people participated in a contest to estimate the weight of a slaughtered and dressed ox. Statistician Francis Galton observed that the median guess, 1207 pounds, was accurate within 1% of the true weight of 1198 pound”
It sounds magical, bunch of people seemingly throwing out numbers and their average works. How come? Here is how. Humans already have built-in knowledge about the visual-look-weight connection on many items, so their guesses will be already close enough to the real thing, with some noise associated. The distribution of that noise will be bell-shaped (Gaussian). This is important, bcz if normally distributed, averaging such guesses, even with erros, fixes the error.
This technique even works internally sometimes, it is called “the wisdom of the crowd within”. “[Researchers] asked participants for point estimates of continuous quantities associated with general world knowledge, such as ‘[w]hat percentage of the world’s airports are in the United States?’ [then] half of the participants were immediately asked to make a second, different guess in response to the same question [..t]he average of a participant’s two guesses was more accurate than either individual guess”
“Can’t we use the same idea for policy, like millions making policy?”
No. For judging the weight of something, we already have perhaps inborn, at the very least life-long experience there… During our lives we have handled, touched, carried things, so looking at an object we can make weight guesses. The estimate will have noise but it won’t be far off from the truth which can be corrected statistically. Policy is not something people are engaged in daily. Which makes it a speciality. Averaging among specialists will work, not among everyone.
The Mechanism of Averaging
To elaborate more on how consensus among (knowledgeable) people can result in correct decisions.. Remember earlier we said 800 people estimated the weight of an ox correctly. Statistician Francis Galton observed that the median guess, 1207 pounds, was accurate within 1% of the true weight. Magic.
The reason is, guesses have noise, the right kind of noise, around the right answer. Averaging removes noise.
The noise distribution is bell-shaped, “normal” or a “Gaussian” (a dist is the formulaic form of a histogram, occurence count, frequency).
Normal distribution is weird; it shows up everywhere. Take a group of ppl, their height dist is normal.
Have someone shoot at a target, measure distance from each hit to bulls eye, dist is normal.
Whenever many factors contribute to a thing, normality occurs.. bcz sums of anything (random) approaches normal. And there are many things like that in nature
Demo. Throw a 6-sided die 1000 times (numbers below are from software generator), histogram rolls,
import random
n = 1000; b = 6
rolls = [random.randint(1,6) for i in range(b*n)]
rolls = np.array(rolls)
plt.hist(rolls,bins=6)
plt.savefig('dice2.png')
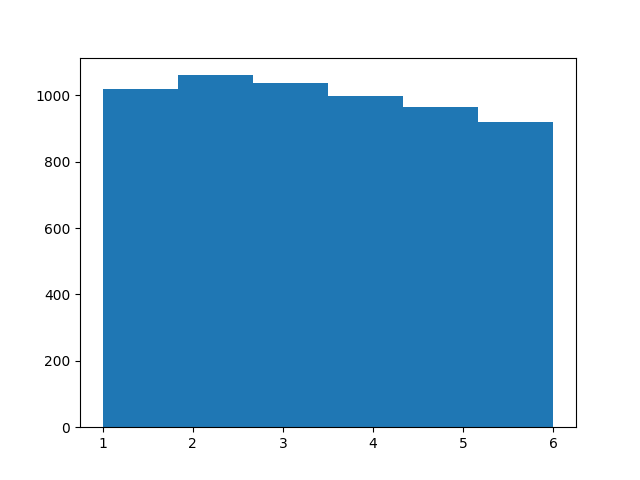
Nearly uniform (not normal), all equal chance,
But if I sum every 6 die throws and histogram,
rolls = [random.randint(1,6) for i in range(b*n)]
rolls = np.array(rolls).reshape(n,b)
s = np.sum(rolls,axis=1)
plt.hist(s,bins=12)
plt.savefig('dice1.png')
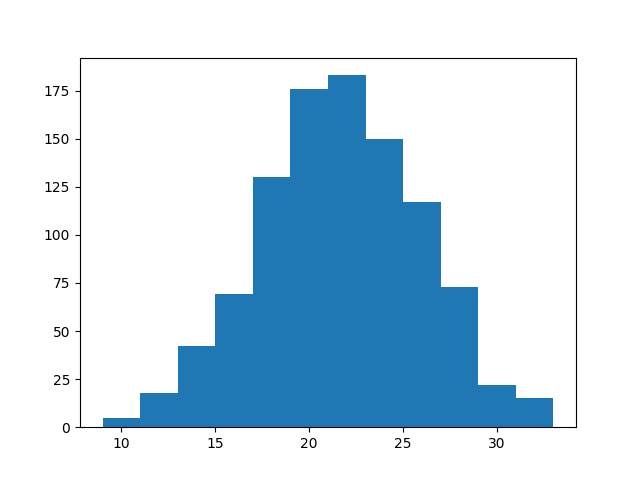
Bell shaped. Normal.
Why? Bcz more sums result in a 6 than 2. I can get 6 with 4+2,2+4,1+5,3+3,etc.. More chance to hit it. Very low, very high nums are harder. Easy sums form the bulk in the middle.
Anyway; then, if shooting errors, weight guesses are true value + normal noise,
averaging removes noise, bcz average of zero-centered
Gaussian (which is noise) is zero. This is the magic.
(Height is normal of course.. many factors contribute to height. Some ppl might have a fat ass, small back, others large back, skinny ass. Large or small head.. All cld lead to same height)
Both shooting, and weight guessing involves knowledge / skill BTW, very important. Good noise around bullseye means person knows how to shoot. Judging weight by naked eye is possible bcz we have innate knowledge of weights of things, through evolution, and part of growing up, so the noise is normal. Stat ppl know this, when they apply a model to data, they determine whether it is good by looking at its mistake, its “residual” (diff between model pred, and real data). If resid is gaussian, they are happy. Bad models leave patterns in data. When unskilled (or dumb) people eff up you know why. There is pattern in their eff ups (usually due to some bias).